Who We AreWe are a team of Jordan High School students who share a common interest in rocketry and engineering. We collaborate with our mentor Mr. Dave Morey, who is certified by the National Association of Rocketry (NAR) and Tripoli to build and launch high-powered rockets.
|
Our Goals
|
We decided to participate in both the Sounding Rocket and the Mars Rover Events at the Battle of the Rockets competition. We worked on both challenges, focusing on the Sounding Rocket which we had to build from scratch. Last year's rocket was reused for the Rover event since many criteria were met. The team worked 2-3 hours every week in order to accomplish everything efficiently in time. We had devices installed in our payload which signaled to us altitude, velocity, barometric pressure and humidity. Since it was our first time designing a rover, it was much more fascinating than the sounding rocket. The rover was designed to move around in a square and take pictures at each corner. We won the Sounding Rocket event in the competition, due to our dedication and strong work ethic.
Team History We began at Durham School of the Arts (DSA), where a group of students (Right) achieved national honors in the Team America Rocketry Competition (TARC). With this accomplishment, the team qualified for participation in the NASA Student Launch Initiative (SLI) program for the 2012-2013 school year. The team was expanded to the entire Durham area high schools because of interest and resources beyond what the Durham School of the Arts could provide on its own. In 2011, the team submitted a proposal, but unfortunately it was not accepted. During the 2012-2013 school year, however, a new team consisting of students from multiple area schools formed to try again. Their proposal was accepted, and they spent their year designing, building, and testing their rocket.
Through the Student Launch Initiative, the team became a contractor for NASA, providing the participants with experience in aerospace engineering and the design review process. As an essential component of the project, DART wrote a proposal and three extensive design reviews detailing key stages of development prior to the launch. Our goal was to launch and safely recover our 8’6” rocket, proudly dubbed, "No Bull!" to an altitude of one mile, while testing the accuracy and redundancy of TARC altimeters.
In April 2013, eight students from DART traveled to Huntsville, Alabama to fulfill the launch requirements for the Student Launch Initiative. This included an on-site launch readiness review which tested our knowledge of the rocket itself, followed by a "rocket fair" where we presented our project to teams from around the country. Launch Day finally came on April 21. Our launch was a resounding success on the borderline of catastrophe, and "No Bull's" final altitude was 5310 feet. This was only 0.5% away from our goal of 5280 feet, and we returned home with high hopes for the future. In 2015, the team was accepted into the year's Student Launch.
|

Above: The 4 finalists from DSA at the 2011 TARC finals. "Team Pumba" placed 15th overall. From left to right, Theresa, Krista, Frances, and Sarvani. Theresa is now a student at Princeton, Krista and Sarvani are at UNC Chapel Hill, and Frances is at the University of Pennsylvania.

|
2014-2015 Project

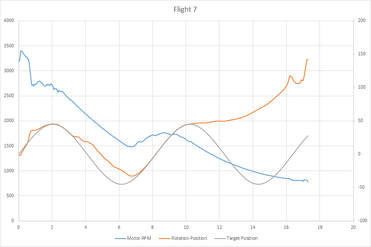
The seventh launch in Orangeburg, South Carolina. We used a new battery to spin the motor faster. However, the lack of friction and power still caused some problems.
|
Unfortunately, due to budget restraints, SLI was not held during the 2013-2014 school year. During this time, a TARC team from Jordan High School placed 25th in the final competition, making our school eligible for SLI for the next two years. Last year (2014-2015), the team, still known as DART, consisted of students from Jordan, the North Carolina School of Science and Math (NCSSM) , and City of Medicine Academy. For our payload, the team designed a Roll Alignment Device (RAD), utilizing gyro sensors to detect angular displacement and a spinning metal flywheel to generate torque to counteract this displacement. Many hours were spent programming and testing this device, and by the end of the year, there was marketable improvement to our rocket's flight path. The image at left depicts flight data from our last flight of the year. The grey line represents our target position (in this flight, it is set to oscillate between two points), the orange line represents our actual position, and the blue line represents motor RPM. It is clear that, initially, the RAD is able to keep up fairly well with the set parameters. However, due to low friction, the flywheel was not able to slow down fast enough to match the position set by the program. Because of the team's commitment to this payload, we are using it in our project for the 2015-2016 school year. We have made many improvements to the roll control mechanism, including a new, heavier flywheel and motor controller that allows braking, rather than relying on friction to slow the flywheel down. These improvements will allow us to present an even more effective payload than we had the previous year.
|
2015-2016 Project
To date, 2016's project was the last time we entered Student Launch. For our second and final year of qualification, we redesigned the roll control device from 2015's project and added in a balloon payload. The rotational alignment device (RAD) uses gyroscopes to detect spin and a heavy flywheel to counteract it. We refined our programming for this device and used a heavier flywheel. The balloon payload was designed to allow the rocket to be identified in tall grass. It deployed a helium balloon upon the rocket's landing. The RAD worked in our final launch, but there is no way to tell if the balloons did. The launch in Huntsville resulted in the rocket being dragged by its parachute for almost a mile. This was our last year in Student Launch, but we hope to qualify again in the 2017 school year.
|
2017-2018 Project
|
2016-2017 Project
This project began with the knowledge that it would be very different from NASA Student Launch. The team entered into Battle of the Rockets, a difficult competition that focused on creating a rocket that could travel to a mere 1,000 feet and deploy a payload (pictured below). The team's payload used an Arduino to control operations, including detecting launch, apogee, and landing, and well as uprighting the payload and raising a camera mast, before sending telemetry back to a ground station. This telemetry included humidity, temperature, atmospheric pressure, barometric pressure, luminosity, pictures, acceleration, GPS, and roll data. All of this was parsed onto a computer program that made it easy to interpret. At this competition, the team took first place, beating out many colleges including Northwestern, Case Western, and Northeastern.
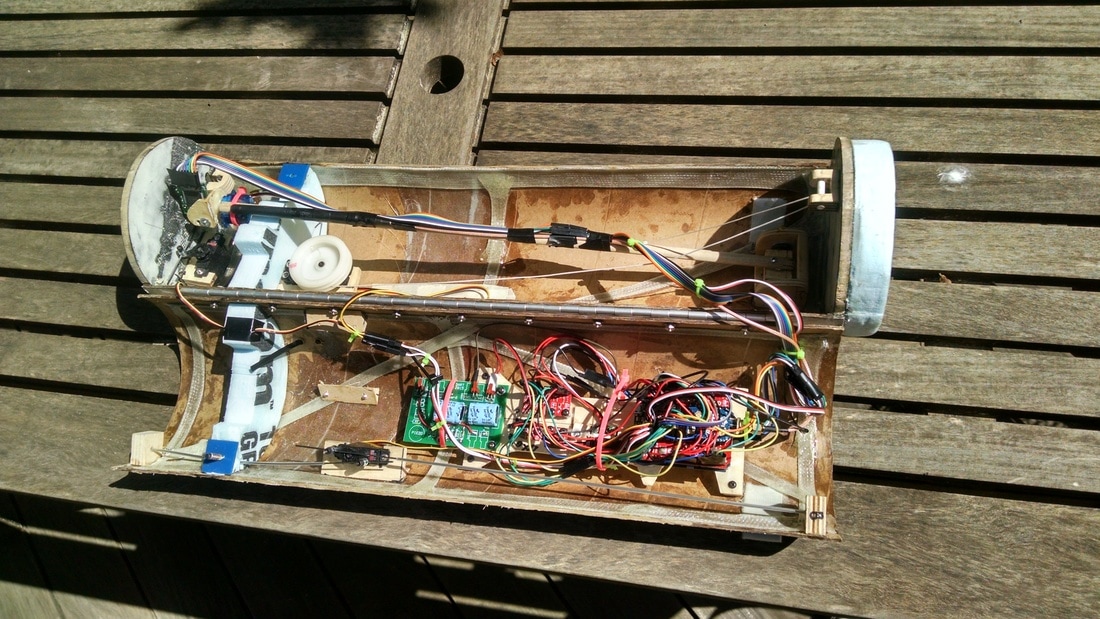
Above, the payload from Battle of the Rockets, once it had self-up righted.
|
